مدتی است که رباتهای پرنده و پهبادها به طور ویژه مورد توجه پژوهشگران و مراکز نظامی قرار گرفتهاند. رباتهای پرنده شاید تمامی پرنده های بی سرنشین رو در بر بگیره اما از نظر خیلی از کارشناسها کوادرتور ها میتوانند به حق این لقب رو یدک بکشند چون ترکیبی از مکانیک پرواز – الکترونیک و کامپیوترند. […]
مدتی است که رباتهای پرنده و پهبادها به طور ویژه مورد توجه پژوهشگران و مراکز نظامی قرار گرفتهاند. رباتهای پرنده شاید تمامی پرنده های بی سرنشین رو در بر بگیره اما از نظر خیلی از کارشناسها کوادرتور ها میتوانند به حق این لقب رو یدک بکشند چون ترکیبی از مکانیک پرواز – الکترونیک و کامپیوترند.
کوادکوپتر(به انگلیسی: Quadcopter یا Quadrotor) بالگرد گردنده بالی است که نیروی بَرآر آن بکمک چهار پروانه عمودی عمل می کند. این پهپاد کوچک دارای مصارف متعدد است و برای مطالعات تحقیقی و جستجو کاربرد دارد.
کوادکوپتر از چهار موتور که چهار پروانه ثابت بر آن سوار شده تشکیل یافته و هر جفت پروانه در خلاف جهت هم حرکت می کنند و ریزکنترلگر آن جهت چرخش را به وسیله کنترل زمین تنظیم می کند. با کم و زیاد کردن سرعت چرخش پروانه ها، گشتاور نیرو تغیر کرده و حرکت و یا فرود و اوج آن کنترل می گردد. از طرف دیگر وزن کم آن و متمرکز شدن آن وزن در یک نقطه کوچک، حساسیت زیادی را در کنترل چرخش پروانه ها نیاز دارد.
چرخش پروانهها: کنترل بشکل H و N


قسمتهای ربات:
موتور : اکثر کوادروهای پیشرفته از موتورهای براشلس برای حرکت استفاده میکنند.
این نوع موتور ها بسیار کوچک- سبک و پرقدرتند. دلیل این امر هم این است که بخاطر عدم وجود جاروبک یا همان زغال در این نوع موتورها هم اصتحکاک بسیار که بوده و هم میتوان توان و جریان بالایی را به موتور اعمال کرد. این موتورها به دونوع اینر و اوتر تقسیم بندی میشوند که در کوادرو ها اکثرا از نوع اوتر انهم بخاطر دور پایین استفاده میشود. البته بزودی در پستی جدا به موتورهای براشلس به صورت تخصصی تر خواهیم پرداخت.
اسپید کنترل : یا همان راه انداز موتور براشلس . در موتورهای براشلس بخاطر عدم وجود جاروبک عمل کموتاسیون و تغییر قطبها و در نهایت چرخش موتور بصورت مصنوعی و توسط اسپید کنترل یا درایو موتور براشلس انجام میشود. اصول کلی کارکرد این قطعه بر اساس تولید نوسان که برق مستقیم را به صورت متناوب در میاورد نیز میباشد.
در انتخاب درایو باید دقت بسیاری شود که تعداد استپهای پیشبینی شده در درایو هر چه بیشتر باشد پرنده پروازی نرمتر و پایدارتری را به نمایش خواهد گذاشت.
ملخ : در انتخاب ملخ دو فاکتور از بقیه پر اهمیت تر است و از طول و گام ملخ است که معمولا به اینچ و به صورت پیوسته بروی ملخ نوشته میشود. برای مثال ملخ ۶*۸ ملخی است با طول ۸ اینچ و گام ۶ اینچ. گام یا همان میزان پیشروی به میزان پیشروی ملخ در هر دور در واحد اینچ نیز اطلاق میشود. البته ملخها از منظر نوع موادی که در ساخت ان به کار رفته هم به چند دسته تقسیم بندی میشوند که از ان جمله میتوان به ملخهای چوبی –  پلاستیکی و مواد مرکب یا کربنی نیز اشاره کرد.
پلاستیکی و مواد مرکب یا کربنی نیز اشاره کرد.
باطری : شاید دغدغه اصلی سازندگان وسایل پرنده الکتریکی تامین انرژی این نوع از پرنده هاست. شاید در گذشته ای نه چندان دور این امر تا حدودی غیر ممکن مینمود اما با ورود و عرضه باطریهای لیتیوم پلیمر یا همان لیپو دنیای پرنده های الکتریکی وارد مرحله جدیدی از زندگی خویش شد. چون باطریهای لیپو با دارا بودن وزن کم – قدرت زیاد و قدرت تخلیه جریان بسیار بالا میزان ساعت پروازی به مراتب بالاتری را به پرنده های الکتریکی میدهند.
شاسی یا بدنه : اما اخرین قسمت بدنه پرنده است که میتوان از بیشتر مواد سبک وزن در ساخت ان استفاده کرد اما در پرنده های حرفه ای تا نیمه حرفه ای اکثرا از الیاف کربن برای ساخت بدنه کوادروتورها استفاده میشود چون الیاف کربن با دارا بودن مقاومت بسیار بالا وزن بسیار کمی را به خود اختصاص میدهند.
شتاب سنج : شتابسنجها بر اساس گرانش زمین کار میکنن و میتونن زاویه دقیق سطحی که روش قراردارند رو حتی در حالتی که خاموش هستند اندازه گیری کنند و در نتیجه وقتی اونهارو در حالت بدون تغذیه رو سطحی بذاریم و بعد با اتصال تغذیه به اون روشنش کنیم میتونن زاویه سطح رو برای ما اندازه گیری کنند خصوصیتی که در ساخت کوادرتورها بسیار مهمه .شتابسنجها عموما از نظر تعداد محورهای ازادی که عموما دو ویا سه محوره هستند تقسیم بندی میشوند و در مدلهای مختلف دارای دقتهای متفاوتی نیز میباشند.
ژیرسکوپ: ژیروسکوپ سرعت زاویه ای رو به ما نشون میده که میشه ازش زاویه رو براحتی استخراج کرد.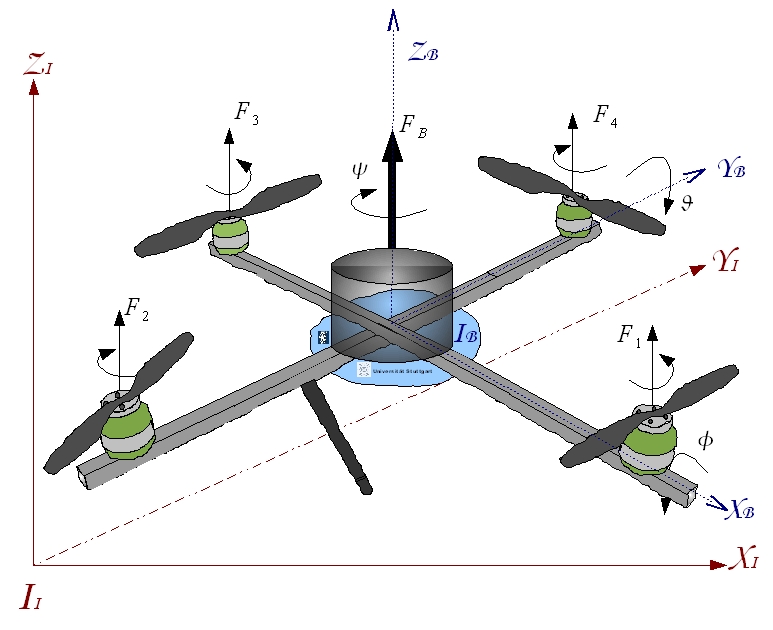
موانع و مشکلات:
۱)تغییر دور ناخواسته پره ها و عدم تعادل در سرعت چرخش پره ها: این امر ممکن است بخاطر عوامل زیاد و گوناگونی اتفاق بیفتد ازجمله اصطحکاک متفاوت موتورها بخاطر کثیفی موتورها یا همدور نبودن خود موتورها یا عدم همخوانی استپهای کنترل دور یا مسائلی از این دست
۲)عدم تعادل وزنی پرنده: این مسئله که بسیار شایع است ممکن است بخاطر عواملی چون تغییر مرکز ثقل و یا نصب نامتقارن تجهیزات اصلی و یا فرعی مانند دوربینها و سنسورها و یا عوامل خارجی دیگر رخ دهد
۳) اما مهمترین مسئله در عدم پایداری باد است: باد به تنهای میتواند تعادل تمامی پرنده ها را برهم بزند و کوادرتور هم جدا از این مسئله نیست.اما بادها جور دیگری هم خودنمایی میکنند و ان تاثیر باد ناشی از خود ملخها که شامل جریان گردابی ملخها و جریان برگشتی از سطح زمین میشود که بصورت نامتعادل به خود پره ها و بدنه پرنده برخورد کرده و بشدت تعادل پرنده را برهم میزند.
اما اثر مشکل عدم تعادل به این گونه است که اگر پرنده به هر دلیلی از دلایل فوق ۱درجه و شاید هم کمتر از تعادل خارج شود بردار رانش موتورها از حالت عمود خارج شده و پرنده به صورت ناخواستا به یک سمت حرکت میکند که این امر با ازدیاد زاویه ناپایداری سرعت بیشتری میگیرد به طوری که باعث برخورد ناخواسته و عدم ثابت ایستادن پرنده میشود و در نهایت منجر به سقوط و انهدام پرنده میشود.
کوادرتور از چهار ملخ که دو به دو بر خلاف جهت هم میگردند تشکیل شده است. یعنی به این صورت که دو ملخ روبروی هم به صورت همجهت به یک سمت میچرخد و دو ملخ روبروی دیگر که باز روبروی هم قرار دارند به صورت همجهت بوده و در خلاف جهت جفت ملخ اول میچرخد. برای درک بهتر موضوع به عکس زیر توجه کنید :
اما دلیل این امر اینه که ملخها دو به دو اثر عکس العمل همدیگه رو خنثی کنند.
اما نحوه کنترل حرکت کوادرتورها به صورت زیر است :
برای حرکت پرنده در محور عمود باید دور جفت ملخهای یک جهت کم و به همون مقدار دور جفت ملخ جهت مخالف افزوده بشه. این کار باعث میشه بدون تغییر ارتفاع نیروی عکسالعمل یک سمت از سمت دیگه بیشتر بشه و در نتیجه پرنده در یک سمت حول محور عمودی بچرخه.
اما برای حرکت پرنده حول محور عرضی و طولی لازمه بین دو ملخ همجهت یک تفاضل دور به وجود بیاریم.به این ترتیب یک سمت پرنده به سمت بالا رفته و طرف دیگر به سمت پایین میل پیدا میکند که این امر باعث کچ شدن بردار رانش و حرکت پرنده به سمتی که بازویش پایین تر است میشود و هر جه مقدار این انحراف بیشتر باشد سرعت پرنده نیز بیشتر میشود. برای تغییر ارتفاع هم فقط کافیه سرعت هر ۴ ملخ را با هم کم یا زیاد کنیم .
کاربرد:
با نصب دوربین ویدیویی بر روی آن، تصویر برداری از سطح میسر می گردد و از آن در امور نظامی، کنترل ترافیک، و نقشه برداری استفاده می شود.



















مسائل تخصصی:
هر ربات از ۳ بخش اصلی تقسیم میشود:
۱.مکانیک
۲.الکترونیک
۳.برنامه نویس یا نرم افزار
۱ . مکانیک :
مکانیک کوادکوپتر ها به صورت ساده از ۴ قسمت برای نصب موتورها و قسمتی برای نصب مدار الکترونیکی و قسمتی برای نصب باتری و قطعات دیگر مانند گیرنده و … و قسمتی برای نصب دوربین که این قسمت معمولا به صورت مانت دوربین ۲ محوره طراحی می گردد که از لرزش های حاصل از موتور ها و عوامل محیطی دیگر ، بر تصویر ضبط شده تاثیر نگزارد
بیس اغلب فریم ها برای کوادکوپتر معمولا به صورت + می باشد و یا می توان به صورت چهار چوب به صورت # طراحی کرد
بهترین گزینه برای ساخت بدنه کوادکوپتر استفاده از فیبرکربن میباشد که به دلیل موجودیت کم ، از آلومینیوم و یا چوب برای بیس و برای جایگاه نصب موتور و مدار و … از پلکسی و یا فایبرگلاس (فیبر مدار چاپی) برای این منظور استفاده می شود
جزء دیگر مکانیک کوادکوپتر ها ، ملخ می باشد که دارای ۲ مشخصه گام و سایز است که نسب به موتور انتخاب می شود و با دریافت کردن دیتاشیت موتور می توانید ملخ های معرفی شده برای استفاده با موتور مورد نظر را مشاهده نمایید
۲ . الکترونیک :
مدار الکترونیکی (فلایت کنترلر) که برای کنترل موتور ها و تنظیم سرعت آنها نسبت به داده های دریافتی از سنسور ها و گیرنده رادیوکنترلر و ماژول ها و …
سنسور ها و ماژول هایی که در فلایت کنترلر ها استفاده می شود مانند :
۱- جایرو : برای اندازه گیری شتاب خطی می باشد
۲- سنسور شتاب سنج : برای اندازه گیری شتاب زاویه ای می باشد
۳- GPS
۴- فرستنده گیرنده
۵- بارو متر
۶- میدان سنج مغناطیسی
۷- فاصله سنج
و …
اسپیدکنترلر :
مشخصات اسپیدکنترلر ها :
۱ . رنج جریان های مورد نیاز برای بلند شدن پرنده از زمین از ۱۵ آمپر به بالا شروع می شود و خیلی عادی است اگر پرنده شما در لحظاتی ۳۰ آمپر هم مصرف نماید ساخت این مدار با این توانایی آمپر دهی چقدر هزینه دارد ؟
۲ . باطری یکی از قطعات گران قیمت روی پرنده است ( در بسیاری از موارد گرانترین قطعه است اگر با رنچ قیمت آشنا نیستید به عنوان مثال یک باطری ۳ سل با ۲۲۰۰ میلی آمپر ساعت و ۲۵c در حدود ۶۰ الی ۷۰ هزار تومان قیمت دارد ) آپشن های حفاظتی که در هنگام تخلیه و حد مینیمم ولتاژ باطری باید لحاظ شود توسط اسپید کنترلر قابل برنامه ریزی است تا از آسیب باطری جلوگیری شود!
۳ . رزولیشن اسپید کنترلر ها به مفهوم کمترین بازه تغییرات عرض پالس سیگنال PWM ورودی که توسط اسپید قابل درک است و دیده می شود بطور قابل قبولی کم است!
۴ . کالیبراسیون اسپید کنترلر ها برای مینیمم و ماکسسیمم سرعت برای یک موتور قابل برنامه ریزی است
۶ . برای انواع موتور ها با تعداد قطب های مختلف قابل برنامه ریزی است
۷ . تنظیماتی همچون Brake,Battery type,Rotation reverse,Soft start,Under voltage,Timing,Frequency,Active RPM Control
مانند تنظیمات برای انواع باتری ها و تنظیمات فرکانس و …. که این قابلیت ها توسط رادیوکنترلر و بوق هایی که توسط اسپیدکنترلر تولید میشود ، قابل تنظیم است
و بسیاری از امکانات دیگر ….
رادیوکنترلر :
برای شروع می توانید از رادیوکنترلر با قیمت کم استفاده کنید که نمونه زیر مناسب می باشد :
WFLY 4 Channel 2.4Ghz
این مدل رادیو کنترل ۴ کانال است و در فرکانس ۲٫۴ گیگاهرتز می باشد و در جعبه آن رادیو کنترل و ریسیور موجود است.
باتری :
باتری باید متناسب با نوع موتور انتخاب شود (مراجعه به دیتاشیت موتور)
باتری های مورد استفاده در کوادروتور باتری های لیتوم پلیمر Li-Po و با آمپر متوسط بین ۲۰۰۰ تا ۲۵۰۰ میلی آمپر و ۳ سل و میزان تخلیه و دشارژ بین ۲۰c تا ۳۰c انتخاب می شود که باز هم لازم به ذکر است که باتری باید متناسب با موتور مورد استفاده انتخاب شود (مراجعه به دیتاشیت موتور)
۳ . برنامه نویسی یا نرم افزار :
این برد که معروف به برد kk می باشد از سایت – قابل عرضه میباشد و به همراه آموزش ساخت و راه اندازی این برد در یک مولتی روتور قابل استفاده است .
دانلود منابع آموزشی:
Download “مبانی طراحی رباتهای عمود پرواز”
Download “quadricopter”
Download “آموزش طراحی کوادروتور قسمت اول”
Download “آموزش طراحی کوادرتور قسمت دوم”
Download “آموزش طراحی کوادرتور قسمت سوم”
خرید متن کتاب آموزش کوادرتور به زبان اصلی
جهت دانلود بقیه کتابها به آدرس زیر برورد